
ПП оказалось эффективнее ЭШО и рывков
Эффективность дрессировки собак с электронными ошейниками с дистанционным управлением и без них по сравнению с фокусом на положительном подкреплении
(Перевод: Подкосова Юлия, K9friendly)
Оригинальная статья: Efficacy of Dog Training With and Without Remote Electronic Collars vs. a Focus on Positive Reinforcement – Lucy China, Daniel S. Mills and Jonathan J. Cooper
АБСТРАКТ
Мы оценивали эффективность дрессировки собак с помощью электронных ошейников с дистанционным управлением и без них по сравнению с дрессировкой на положительном подкреплении. В исследовании приняли участие 63 собаки с известными проблемами поведения, будучи без поводка, такими как плохой подзыв. Они были поделены на три дрессировочные группы (в каждой n = 21) и получили до 150 минут дрессировки на протяжении 5 дней с целью улучшения подзыва и общего послушания. Эти 3 группы были следующими: 1) Экспериментальная (электронные ошейники) – выдвинутые производителем дрессировщики, которые использовали электронные стимулы как часть своей программы дрессировки; 2) Контрольная 1 – эти же самые дрессировщики, которые работали так, как они обычно работали бы без применения электронных стимулов; 3) Контрольная 2 – независимые профессиональные дрессировщики, которые фокусировались в своей работе преимущественно на положительном подкреплении. Сбор данных сосредоточивался на реакциях собак на две команды: “ко мне” (подзыв к дрессировщику) и “сидеть” (опускание зада на землю). Это были две самые часто используемые в процессе дрессировки команды, при этом улучшение подзыва было целевым поведением для испытуемых собак. Измерения эффективности дрессировки включали в себя количество команд, поданных, чтобы вызвать реакцию, и задержка реакции. Контрольная группа 2 достигла значительно лучшей реакции на обе команды “сидеть” и “ко мне”после единичной подачи команды в отведенное время. У этих собак также была более короткая задержка реакции, чем у Экспериментальной ЭО (электронные ошейники) группы. Не было обнаружено значимой разницы в пропорции невыполненных команд между всеми тремя группами, хотя собакам из Контрольной группы 2 было подано значительно меньше команд. Не обнаружено различия в количестве вербальных команд, поданных в каждой группе, но в Контрольной группе 2 было использовано меньше сигналов рукой и поводком, а в Контрольной группе 1 этих сигналов было использовано больше, чем в ЭО-группе. Данные результаты опровергают предположения, что дрессировка с использованием ЭО более эффективна или дает более надежное послушание, даже в руках опытных дрессировщиков. По многим параметрам дрессировка с использованием положительного подкрепления оказалась более эффективной в части как достижения целевого поведения, так и общего обучения послушанию. Этот метод дрессировки также несет с собой меньшие риски благополучию собаки и качеству отношений между собакой и человеком. Исходя из полученных результатов, мы предполагаем, что нет никаких доказательств, поддерживающих необходимость применения ЭО в дрессировке, даже для наиболее широко приводимых показаний к его применению.
ВВЕДЕНИЕ
Успешное обучение послушанию собак требует от дрессировщиков эффективного использования и хорошего тайминга сигналов, а также подкрепления и/или наказания. Когда дрессировка включает в себя аверсивные или вредоносные стимулы, это может привести к наказанию, если собаки не ведут себя так, как требуется (1, 2). Растущее понимание применения теории научения к благополучию собак привело к тому, что многие дрессировочные центры, благотворительные организации и ученые выступают за так называемые более гуманные методы, которые фокусируются на использовании и своевременности наград (3-9).
Электронные вспомогательные средства в дрессировке принимают самые разные формы, но, как правило, они включают в себя крепящееся на ошейнике устройство (Электронный ошейник, ЭО), которое может выдавать стимул в виде разряда тока в шею животного наряду с другими стимулами, такими как звуковой сигнал или вибрация (10). ЭО включают в себя устройства с ручным пультом дистанционного управления; устройства, активируемые лаем или шумом (ошейники-“антилай”) и системы ограничения передвижения (“невидимая изгородь”) (11). В целом, ЭО разработаны таким образом, чтобы можно было связать звуковой/вибрационный сигнал с последующим ударом током в качестве сигнала-“предупреждения”. Если собака его проигнорирует, к ней может быть применен электрический стимул, пока она не осуществит желаемое поведение. Таким образом, посредством сочетания отрицательного подкрепления и классического обусловливания собака может научиться избегать электрический стимул, осуществляя желаемое поведение. Однако, если электрический стимул предоставляется не своевременно (с плохим таймингом), могут сформироваться нежелательные ассоциации (11-13). Противники ЭО утверждают, что, поскольку эти устройства используют аверсивные стимулы для предотвращения нежелательного поведения, они несут с собой повышенный риск нежелательных результатов дрессировки (таких как негативные изменения эмоционального состояния или непредсказуемые ассоциации), по сравнению с дрессировкой, основанной на наградах, особенно в руках недостаточно обученных или неопытных владельцев (14-18). И наоборот, те, кто выступает за использование ЭО, утверждают, что эти устройства, особенно в руках опытного дрессировщика, могут быть использованы для модификации поведения посредством отрицательного подкрепления, с ограниченной подверженностью вредоносным стимулам, и тем самым являются ценным дрессировочным инструментом. Производители ошейников сообщают, что преимущество этих систем состоит в том, что они дают владельцу контроль над собакой даже на расстоянии (19) и эффективно подавляют сильно мотивированное поведение, такое как охотничье, причину погонь за домашним скотом и непреднамеренного убийства диких животных (20-23). Также утверждается, что ЭО успешно применяются в лечении проблем поведения, благодаря чему собаки могут избежать ненужной эвтаназии, неутешительного исхода для владельцев (24).
Использование ЭО в дрессировке собак в Великобритании, судя по всему, снижается, примерно с 6% всех домашних собак в 2012 году (25) до приблизительно 1% в 2019 (26). Это снижение может отражать текущую политику государства касаемо этих устройств в Уэльсе (ЭО запрещены по (27)) и Шотландии (ЭО не допускаются в дрессировке и их использование может повлечь наказание (28)), а также предлагаемое ограничительное законодательство в Англии (29), наряду с громкими кампаниями против их использования (например, (18)). Тем не менее, хотя эти цифры и кажутся относительно маленькими, они все равно означают, что порядка 100 000 собак в Великобритании подвергаются использованию ЭО, и эти устройства остаются легальными во многих других странах.
Научные исследования выборочно цитируются в защиту своей позиции как приверженцами, так и противниками ЭО, зачастую без должного внимания к качеству дизайна эксперимента или с пристрастной оценкой данных, такой как многочисленные возможные интерпретации изолированных поведенческих индикаторов благополучия (11). Однако, необходимость данных устройств (которая используется для оправдания продолжения их применения (30)) зависит от их эффективности по сравнению с другими подходами в дрессировке (11, 31). Эффективность можно оценить объективно, используя измерения конкретного целевого поведения, а применение профессионально разработанных планов дрессировки, осуществленных опытными дрессировщиками, может снизить риск смещения выборки. В данном исследовании мы напрямую оценивали эффективность использования электронных ошейников для улучшения подзыва (целевое поведение) и общего послушания у собак по сравнению с дрессировкой без ЭО. Принимавшие участие в этом исследовании собаки были направлены к опытным, профессиональным дрессировщикам, поскольку их владельцы испытывали серьезные проблемы с послушанием, включая плохой подзыв, а также погони за скотом и/или агрессивное поведение к другим собакам. Данное исследование сконцентрировалось на устройствах с ручным дистанционным управлением, поскольку они были наиболее часто используемой формой ЭО в Великобритании во время исследования (25, 32), применяемой в первую очередь в качестве средства прекращения погонь и улучшения подзыва. Мы использовали видеозаписи процесса дрессировки, собранные в ходе исследования, спонсированного DEFRA (33) по поручению правительства Великобритании. В отличие от ранее опубликованной работы (31), где эффективность оценивалась по обратной связи от владельца, в данном исследовании записывалась скорость и надежность реакции после каждой команды, чтобы получить более точное, систематичное и объективное измерение эффективности.
МАТЕРИАЛЫ И МЕТОДЫ
Данные были получены из видеозаписей дрессировки собак, которые изначально снимали в рамках исследования, спонсированного DEFRA (33), на протяжении 6 месяцев в 2010-2011 годах. Подробности набора участвовавших в исследовании собак, режима дрессировки и сбора видеоданных были опубликованы ранее (31, 33), так что представленные здесь методы являются обзором с дополнительными подробностями об отличии подхода, использованного в данном исследовании.
Этическое одобрение было предоставлено Комитетом исследовательской этики Университета Линкольна. Владельцы и дрессировщики, участвовавшие в исследовании, дали письменное согласие на использование их собак и видеозаписей в исследовании. Мы проконсультировались с Инспекцией Министерства внутренних дел, и она постановила, что работа не нарушает закон и, следовательно, ей не требуется лицензия МВД, исходя из следующих предпосылок: во время проведения исследования применение ЭО в Англии и Шотландии было легально; собак с такими проблемами поведения в Великобритании обычно обучают с помощью ЭО; и дрессировка осуществлялась опытными профессиональными дрессировщиками по обычным программам дрессировки с письменного согласия владельцев.
Дрессировочные группы
Все участвовавшие в исследовании собаки имели проблемы поведения, включая плохой подзыв и преследование скота, и их владельцам порекомендовали обратиться за профессиональной помощью для решения этих проблем. Все 63 участвовавшие собаки были старше 9 месяцев и ранее не имели опыта с ЭО. Собаки в группах ЭО и Контрольной 1 проходили дрессировку осенью-зимой 2010 года и были поделены на эти группы в случайном порядке. Собак из Контрольной 2 дрессировали весной 2011 года, что означает, что можно было подобрать субъектов, сопоставимых с группой ЭО, на основании имеющихся проблем поведения и оценки владельцами их степени тяжести. В результате получились 3 следующие дрессировочные группы:
- Группа с электронным ошейником (ЭО: n = 21). Собак дрессировали с помощью электронных ошейников опытные, выдвинутые производителем дрессировщики (ЕСМА) (избранные представлять наилучшие практики использования ЭО), чтобы улучшить подзыв и общее послушание. Дрессировщики следовали утвержденной практике, рекомендованной ЕСМА, включающей в себя оценку чувствительности собаки к электрическому стимулу перед дрессировкой и связывание команды-вибрации с электрическим сигналом, чтобы изменять поведение через отрицательное подкрепление. Собаки в этой группе также получали положительное подкрепление, такое как награда едой, и отрицательное подкрепление, такое как давление поводком.
- Контрольная группа 1 (К1: n = 21). Собак дрессировали те же тренеры, кто работал с группой ЭО, используя смесь положительного подкрепления в виде еды и отрицательного подкрепления в виде давления поводка, чтобы улучшить подзыв и общее послушание, но без использования электронных стимулов.
- Контрольная группа 2 (К2: n = 21). Собак дрессировали, чтобы улучшить подзыв и общее послушание, опытные профессиональные дрессировщики, являющиеся членами APDT UK (Ассоциации тренеров домашних собак Великобритании), которая не поддерживает применение электронных ошейников для дрессировки собак (выбранные, чтобы представлять наилучшие практики использования положительного подкрепления или “ненасильственной дрессировки”.
Популяция собак, использованная в этом исследовании, была во многом схожа с популяциями, описанными Блэквеллом и коллегами (25) в их исследовании применения электронных средств дрессировки, а между собаками, причисленными к трём группам, не было существенных различий по их типу или причине направления на дрессировку (31). Наиболее широко представленными породными типами были подружейные собаки (25%), метисы (25%), пастушьи (17%) и терьеры (13%), и их число в каждой из групп было примерно одинаковым, в то время как декоративные и служебные породы не были представлены вообще. 34 (54%) собаки были суками, из них 21 (33%) были кастрированы, а 13 (21%) не кастрированы. Из 29 кобелей было чуть больше кастрированных (19, или 30% от общей популяции), чем не кастрированных (10 или 16%), но между дрессировочными группами не было значимого полового различия. Преследование было самой частой причиной направления на дрессировку в исследуемой популяции (51 из 63 собак, или 81% популяции), из них 18 собак оказались в Группе ЭО, 17 в Контрольной группе 1 и 16 в Контрольной группе 2. Овцы и ягнята были самой частой жертвой преследования, когда владельцы сообщали об этом проблемном поведении, однако они также указывали других с/х животных, таких как лошади и куры, диких животных, таких как кролики и белки, а также машины и бегунов в качестве жертв погони. Остальных собак направили либо из-за плохого подзыва (9 собак, из которых 1 была в ЭО-группе и по 4 в каждой из Контрольных), либо из-за агрессии к другим собакам, будучи без поводка (3 собаки, из которых 2 были в Группе ЭО, 1 в Контрольной группе 2 и ни одной в Контрольной группе 1). Большинство владельцев описывали своих собак как проявляющих это проблемное поведение «всегда» (31 собака или 49% популяции) или «часто» (24 собаки или 38% популяции), что указывает на выраженную тяжесть проблемы в восприятии владельцев. Когда оба этих рейтинга объединили, между тремя группами не было обнаружено значимого различия в степени тяжести по оценке владельцев (31).
Все собаки, участвовавшие в исследовании, носили электронный ошейник во время занятий дрессировкой, чтобы люди, анализирующие данные, были слепы к дрессировочной группе во время просмотра видео. Собаки в контрольных группах носили дезактивированные или «макеты» ошейников, в то время как ЭО собак в Группе ЭО были активны и использовались дрессировщиками. Дрессировка в основном происходила в полевых условиях с овцами и курами в загонах и другими собаками (на поводке) в качестве возможных раздражителей в процессе дрессировки. В ходе занятия собаки в основном находились на 10-метровом поводке; однако дрессировщики могли бросить или отстегнуть поводок, если посчитают это уместным. Во время дрессировки собаки обычно находились на расстоянии 1м от дрессировщика (примерно 70% времени во всех трёх группах), и <5% времени они находились на расстоянии больше 5м от него (во всех трех группах). Дрессировщики во всех трёх группах имели доступ к пищевым наградам и могли использовать их во время дрессировки так, как посчитают нужным. Предварительная работа (31) показала, что, хотя собаки из Контрольной группы 2 получали меньше сигналов в ходе 15-минутных занятий, чем собаки из Группы ЭО и Контрольной группы 1 (32 по сравнению с 59 и 56 соответственно), они с гораздо большей вероятностью получали пищевую награду после правильного поведения, нежели собаки из Группы ЭО или Контрольной 1. Предварительный анализ, проведённый перед этим исследованием с целью определить, какие команды использовались наиболее часто, подтвердил, что в процессе дрессировки еда в качестве награды использовалась примерно в 5 раз чаще в Контрольной 2, чем в ЭО-группе или Контрольной 1 (34). Эта частота подкрепления согласуется с фокусом на обучении на положительном подкреплении в Контрольной 2, по сравнению с сочетанием дрессировочных подходов в остальных двух группах. Для каждой собаки ежедневно записывались на видео два занятия дрессировкой (одно утром и одно днём) на протяжении 5 дней подряд, что в сумме дало в среднем 28.5 ± 4.5 (среднее ± стандартное отклонение) минут видеозаписи на собаку в день и до 150 минут за все 5 дней дрессировки.
Сбор данных
Данные для этого исследования были взяты из двух занятий на первый, третий и пятый дни дрессировки для каждой из собак. Измерения были сосредоточены на показателях эффективности и надежности выполнения команды, включавших в себя задержку осуществления реакции и количество команд, потребовавшихся для выполнения желаемого навыка. Сбор данных фокусировался на двух командах, которые использовались во всех трех группах наиболее часто и которые было легко отличить на видео. Это были команды “ко мне”, обычно использовавшаяся для подзыва собаки, когда та была вдалеке от дрессировщика, и “сидеть”, обычно использовавшаяся, чтобы побудить собаку опустить свой зад на землю и сохранять это положение короткий промежуток времени (смотри Таблицу 1). Команды “ко мне” и “сидеть” были выбраны по нескольким причинам. Обе команды было легко различить и проанализировать на видео во всех трех группах и их нельзя было спутать с другими командами. Во время предварительного анализа видеозаписей эти команды также оказались наиболее часто используемыми во всех трех группах. При предварительном наблюдении были отмечены три формы сигналов, или способа подачи дрессировочных сигналов: вербальный, рукой и поводком. Они также определены в контексте в Таблице 1. Мы также записывали, начинали ли собаки бежать на подзыв после первой команды “ко мне” (Ко мне), требовалось ли им несколько команд (Ко мне+) для инициирования реакции или они не выполняли навык вообще (Непослушание) (смотри Таблицу 2). Схожим образом мы записывали, садилась ли собака полностью после первого сигнала (Сидеть), после нескольких сигналов (Сидеть+) или не садилась по команде вообще (Непослушание). В ходе предварительных наблюдений, целью которых было установление временных рамок для этих вариантов исхода, большинство собак выполняли команду в течение 2с с подачи первого сигнала, а когда собакам давали несколько команд, обычно это ограничивалось 2 или иногда 3 командами в течение 10с с подачи первого сигнала. Если собаки не выполняли навык в течение 10с после первой команды, как правило, дрессировщики прекращали их подавать и после короткого отдыха, длившегося обычно больше 10с, начинали снова. Этот подход был схожим во всех трех группах, поэтому определение успешных выполнений и непослушания можно было применить ко всем группам. Чтобы проконтролировать разное число подаваемых команд, абсолютные величины были переведены в % команд, чтобы можно было сравнивать надежность выполнения навыка между всеми тремя группами. Если собака выполняла команду “ко мне”, задержка записывалась как время между подачей первой команды и началом ее выполнения собакой, в то время как задержка в команде “сидеть” записывалась как время между подачей первой команды и моментом полного опускания собакой зада на землю.
ТАБЛИЦА 1. Описания типов подачи (или сигналов) для команд “ко мне” и “сидеть”
| Поданная команда | Тип команды | Описание |
| Ко мне | Вербальная | Собаку побуждают вернуться к дрессировщику/хозяину с расстояния по команде голосом “ко мне”; побуждающие звуки, подаваемые после этого, включают в себя щелчки языком, свист, чмоканье итд., связанные вербальные выражения, такие как “пойдем”, “идем” итд. и использование клички собаки |
| Сигнал рукой | Собаку побуждают вернуться к дрессировщику/хозяину с расстояния по визуальному жесту рукой, представляющему собой манящее движение руки: рука вытягивается в сторону от тела и сгибается в локте, касаясь ладонью груди, либо дрессировщик/владелец похлопывает себя по ноге. Может одновременно сопровождаться другими более физическими действиями | |
| Сигнал поводком | Собаку побуждают вернуться к дрессировщику/хозяину с расстояния следом за натяжением поводка в направлении дрессировщика/владельца или возвращают ее к дрессировщику/владельцу рывком поводка. Может одновременно сопровождаться другими более физическими действиями | |
| Сидеть | Вербальная | Собаку просят поместить зад на землю после подачи вербальной команды “сидеть” |
| Сигнал рукой | Собаку просят поместить зад на землю по сигналу рукой: дрессировщик/владелец сгибает руку в локте, поднося ладонь к груди/центру тела или дрессировщик указывает пальцем за голову собаки. Может одновременно сопровождаться другими более физическими действиями | |
| Сигнал поводком | Собаку просят поместить зад на землю по сигналу поводком, который тянут вертикально вверх над головой собаки или вниз к земле. Может одновременно сопровождаться другими более физическими действиями |
ТАБЛИЦА 2. Описание реакций собак на команды “Ко мне” и “Сидеть”
| Поданная команда | Реакция на команду | Описание |
| Ко мне | Выполняет с первого раза | Собака правильно выполняет команду “ко мне”, совершая шаги, на любой скорости, по направлению к дрессировщику/владельцу после первой же подачи команды |
| Выполняет после нескольких повторов | Собака правильно выполняет команду “ко мне”, совершая шаги, на любой скорости, по направлению к дрессировщику/владельцу после нескольких подач команды | |
| Непослушание | Собака не выполняет подобающим образом команду “ко мне”, либо не двигаясь по направлению к дрессировщику/хозяину вообще, либо не выполняя правильно команду в течение 10 секунд после ее первой подачи, что служило точкой прекращения действия команды | |
| Сидеть | Выполняет с первого раза | Собака правильно выполняет команду “сидеть”, опуская зад на землю, после первой же подачи команды |
| Выполняет после нескольких повторов | Собака правильно выполняет команду “сидеть”, опуская зад на землю, после нескольких подач команды | |
| Непослушание | Собака не выполняет подобающим образом команду “сидеть”, либо не опуская зад на землю вообще, либо не выполняя правильно команду в течение 10 секунд после ее первой подачи, что служило точкой прекращения действия команды |
Извлечение данных и статистический анализ
Наблюдатели просматривали видеозаписи процесса дрессировки в программе Solomon Coder (version: beta 17.03.22) в случайном порядке и вслепую, так чтобы они не могли соотнести собак с их предполагаемой группой. После сбора сырые данные экспортировали из файлов Solomon Coder в лист Microsoft Excel, где собаки уже разделялись по своим назначенным группам. Данные о числе команд (Таблица 3) анализировались по дрессировочным занятиям (сессиям). Некоторые сессии были сосредоточены только на “ко мне” или на “сидеть”, поэтому утренние и дневные сессии объединялись, чтобы проанализировать процент собак, выполнивших навык с первой команды, нескольких команд или не выполнивших вообще и вычислить задержку выполнения. В результате получалось единое ежедневное измерение для каждой собаки. Предыдущая работа Купера и коллег (31) не обнаружила значимых различий поведения собак между утренними и дневными занятиями, и исследовательское сравнение утренних и дневных данных в нашем исследовании с этим согласуется.
Статистический анализ данных осуществлялся с помощью Minitab 17.0, используя основные линейные модели. Дрессировочные группы и дни (1, 3 и 5) обрабатывались как фиксированные факторы, в то время как порядковые номера отдельных собак были случайными факторами, расположенными внутри дрессировочных групп. Поскольку фокус был на эффективности результатов, мы сконцентрировались на основных эффектах и не включали взаимодействия внутри наших моделей, чтобы случайно не раздуть степени свободы в моделях. Если не указано иное, данные представлены как среднее значение ± стандартное отклонение, поскольку фокус был на различиях между группами, а не на вариативности внутри групп.
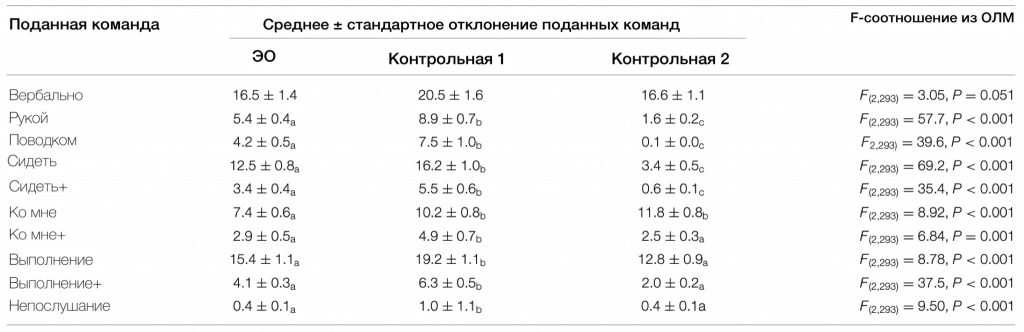
ТАБЛИЦА 3. Среднее число команд, поданных за дрессировочную сессию (±СО), для собак, дрессируемых с ЭО, и двух контрольных групп, включая число вербальных сигналов, сигналов рукой и поводком, сколько раз команды “Ко мне” и “Сидеть” были поданы однократно и многократно (Ко мне+ и Сидеть+), а также, сколько раз собаки выполнили эти команды с первого раза, после нескольких повторов (Выполнил+) или не выполнили вообще (Непослушание).
РЕЗУЛЬТАТЫ
Число команд, сигналов и выполнений навыка
В среднем, за одну дрессировочную сессию дрессировщики подавали 20.3 ± 0.6 команд, из которых 15.7 ± 0.6 (77%) были выполнены с первого раза, 4.1 ± 0.2 (20%) после нескольких повторов и только 0.6 ± 0.1 (3%) не выполнены вообще. В среднем, количество сигналов за одно занятие было 26.8 ± 0.8. Большинство сигналов были вербальными, с 17.8 ± 0.8 вербальных сигналов за сессию (66% всех сигналов). Также за занятие было 5.2 ± 0.3 сигналов рукой (19% от всех сигналов) и 3.8 ± 0.4 сигналов поводком (14%). Различия в количестве вербальных сигналов, поданных собакам во всех трех группах, обнаружено не было (Таблица 3), однако собаки в Контрольной группе 1 стабильно получали больше сигналов рукой и поводком, чем собаки в Группе ЭО, а собаки в Контрольной группе 2 получали меньше сигналов рукой и поводком, чем собаки из двух других групп. Как следствие, собаки в Контрольной 1 получили больше всего сигналов во время дрессировки, в то время как собаки из Контрольной 2 получили меньше всего сигналов в процессе дрессировки, чем другие группы [F(2, 293) = 30.2, P < 0.001].
Контрольная 2 выполнила меньше всего раз “сидеть” в ходе дрессировки, чем ЭО-группа и Контрольная 1, как после первой команды, так и после нескольких команд (Таблица 3), так и в целом [F(2,293) = 74.5, P < 0.001]. Контрольная 1 выполнила больше всего раз “сидеть” и “ко мне” после нескольких команд, а ЭО-группа выполнила меньше всего раз “ко мне” после первой команды и в целом [F(2, 293) = 5.51, P = 0.005].
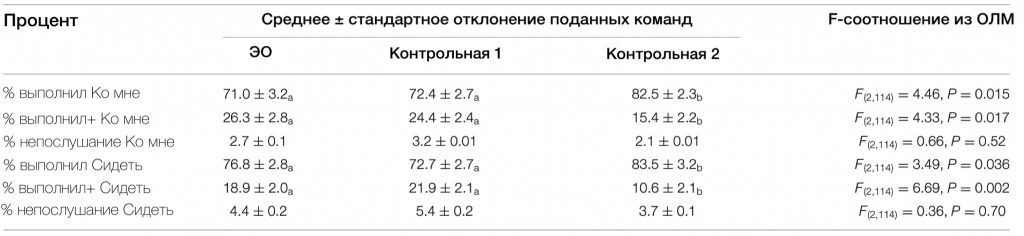
Контрольная 1 показала больше непослушаний, чем ЭО-группа или Контрольная 2 (Таблица 3), но также выполнила больше всего поведений после первой и повторных команд, поскольку она получила наибольшее число команд из всех трех групп. Когда мы проанализировали процентное соотношение выполнений команд, чтобы нивелировать разницу в количестве команд между группами, мы не обнаружили разницы в проценте непослушаний между всеми тремя группами (Таблица 4). Тем не менее, в Контрольной 2 оказался наибольший процент выполнения обеих команд “сидеть” и “ко мне” после первой же команды и наименьший процент выполнения после нескольких команд, чем в обеих Контрольной 1 и ЭО-группе.
ТАБЛИЦА 4. Средний процент команд “Ко мне” и “Сидеть” (±СО), выполненных с первого раза, выполненных после нескольких повторов (Выполнил+) или не выполненных вообще (Непослушание) для собак, обучаемых с ЭО, и обеих контрольных групп.
День дрессировки никак не влиял на количество команд или их выполнений, за исключением использования сигналов (Графики 1-3). Использование сигналов поводком снижалось от первого дня к пятому (График 3: F(2,293) = 17.5, p < 0.001], а сигналы рукой использовались чаще всего на третий день (График 2: F(2,293) = 4.04, p = 0.018]. При этом не было никакого изменения количества вербальных сигналов, использованных на протяжении пяти дней, и общего количества сигналов, использованных в каждый из дней [F(2,293) = 0.16, P = 0.85].
ГРАФИК 1. Среднее (с СО) количество вербальных команд, поданных собакам в ЭО-группе и двух Контрольных группах на протяжении 3 дрессировочных дней. Анализ различий между группами вы найдете в Таблицах 3 и 4; значимых различий между дрессировочными днями не обнаружено.
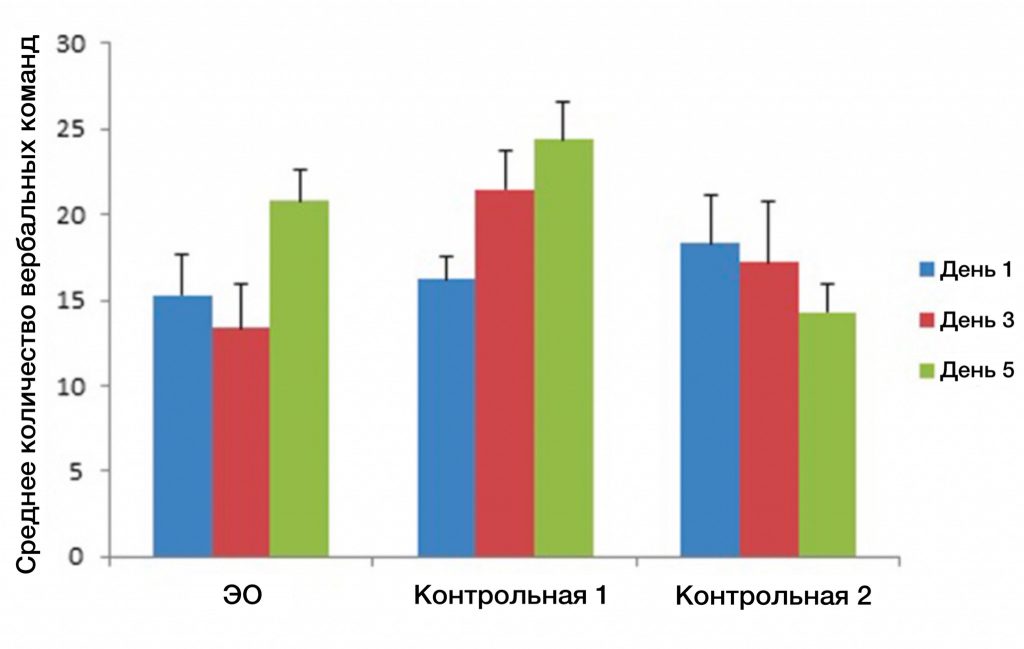
ГРАФИК 2. Среднее (с СО) количество команд рукой, поданных собакам в каждой дрессировочной группе на протяжении 3 дрессировочных дней. Нижний индекс (а и б) указывает, где дрессировочные дни различались на основании попарных сравнений Таки. Анализ различий между группами вы найдете в Таблицах 3 и 4.
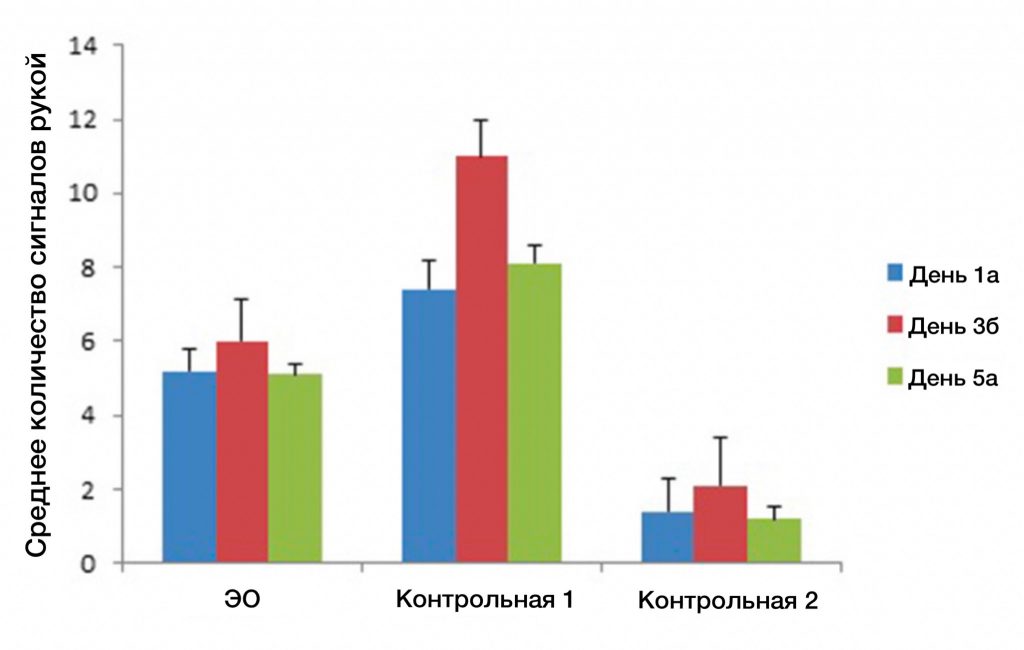
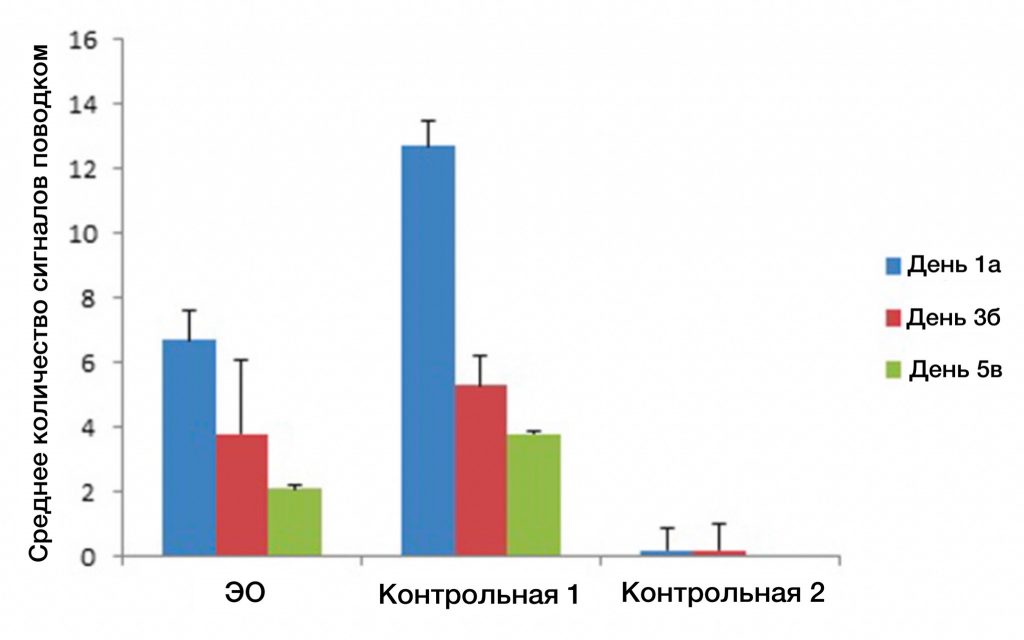
ГРАФИК 3. Среднее (с СО) количество команд поводком, поданных собакам в ЭО-группе и двух Контрольных группах на протяжении 3 дрессировочных дней. Нижний индекс (а, б и в) указывает, где дрессировочные дни различались на основании попарных сравнений Таки. Анализ различий между группами вы найдете в Таблицах 3 и 4.
Задержка реагирования
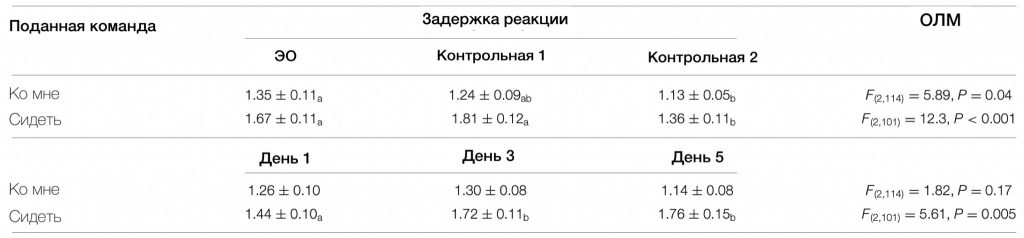
В целом, средняя задержка выполнения команды “ко мне” составляла 1.24 ± 0.05 секунд, в то время как собакам требовалось в среднем 1.64 ± 0.06 секунд на выполнение команды “сидеть”. Между дрессировочными группами были обнаружены значимые различия в задержке выполнения как команды “ко мне” [F(2,114) = 5.89; p = 0.04], так и команды “сидеть”[F(2,101) = 12.3; P < 0.001] (Таблица 5). Для команды “ко мне” в Контрольной 2 задержка выполнения была короче, чем в ЭО-группе. Различие в задержке выполнения команды “сидеть” было по большому счету схоже с таковой для команды “ко мне”, но собаки из Контрольной 2 реагировали быстрее, чем в обеих ЭО-группе и Контрольной 1.
ТАБЛИЦА 5. Средняя задержка выполнения реакции в секундах с момента подачи первой команды (± стандартное отклонение) для собак из ЭО-группы и двух Контрольных групп, которые выполнили команды “ко мне” и “сидеть”, в разные дни.
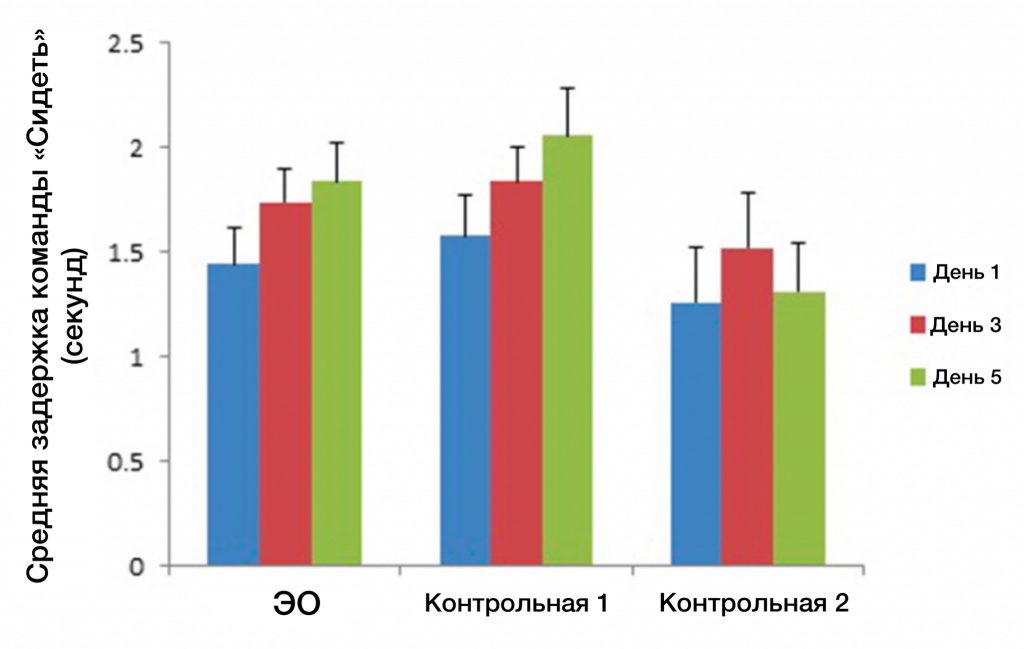
Хотя ЭО-группа и Контрольная 1 показывали видимое сокращение задержки выполнения команды “ко мне” на протяжении изучаемого периода (График 4), не было обнаружено значимого изменения задержки при подзыве между тремя днями дрессировки [F(2,114) = 1.82; P = 0.17]. И наоборот, было обнаружено изменение задержки выполнения “сидеть”[F(2,101) = 5.61; P = 0.005], с большей задержкой посадки в дни 3 и 5 по сравнению с первым днем (Таблица 5), которая была связана с увеличением задержки в ЭО-группе и Контрольной 1 по мере прогресса дрессировки (График 5).
ГРАФИК 4. Средняя (с СО) задержка реакции на команду “Ко мне” у собак в ЭО-группе и двух Контрольных группах на протяжении 3 дрессировочных дней.
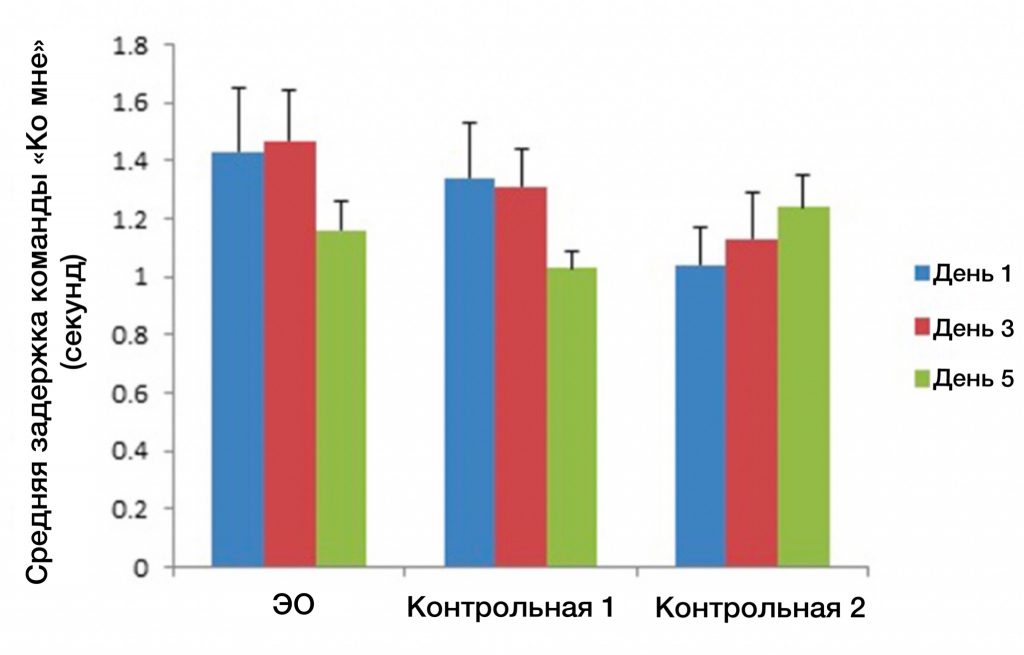
ГРАФИК 5. Средняя (с СО) задержка реакции на команду “Сидеть” у собак в ЭО-группе и двух Контрольных группах на протяжении 3 дрессировочных дней.
ОБСУЖДЕНИЕ
Каждая из трех дрессировочных групп добилась успешных результатов в обеих командах «ко мне» и «сидеть». Пропорция выполнения команд с первого раза была высокой во всех трех группах, а пропорция непослушания была низкой на протяжении всего исследования и не отличалась между группами. Эти результаты согласуются с удовлетворенностью владельцев результатами дрессировки, как сообщалось ранее (31), чего и следовало ожидать, поскольку дрессировщики были профессионалами с большим опытом дрессировки собак с целью улучшения подзыва и общего послушания. Но в Контрольной группе 2, с акцентом на положительном подкреплении, наблюдалась более высокая пропорция выполнения команд «ко мне» и «сидеть» с первого раза, и ей требовалось меньше повторных команд, чтобы инициировать подзыв или завершение посадки. Это позволяет предположить, что основанная на положительном подкреплении дрессировка оказалась наиболее эффективным подходом не только для обучения подзыву, который был целевым поведением, но и для других команд, даже несмотря на то, что позитивные дрессировщики не тратили на обучение команде «сидеть» так много своего времени, сколько две другие группы.
Задержки выполнения команд также указывают на успешные результаты дрессировки во всех трех группах: собаки стали возвращаться к дрессировщику в среднем через 1.24 секунды после подачи команды “ко мне” и полностью садились в среднем через 1.64 секунды после команды “сидеть”. Чуть более долгая задержка посадки, возможно, связана с тем, что критерием выполнения было полное опускание зада на землю, в то время как задержка выполнения “ко мне” высчитывалось как время между подачей команды и началом возвращения к тренеру. Хотя различия между группами были небольшими, собаки в Контрольной группе 2 показали меньшую задержку начала возвращения, чем собаки в ЭО-группе, что согласуется с более высокой пропорцией выполнения команд с первого раза в этой группе. Также между группами были обнаружены различия во времени выполнения команды “сидеть”: Контрольная 2 выполняла ее быстрее, чем ЭО-группа и Контрольная 1, что также согласуется с более высокой пропорцией выполнения этой команды с первого же раза. Стоит отметить, что в первый день дрессировки разница в задержке выполнения “сидеть” между тремя группами была не большая, поскольку собаки из всех трех групп надежно выполняли этот навык еще до начала дрессировки, но по мере прогресса увеличение задержки в ЭО-группе и Контрольной 1 стало заметным. Эти находки согласуются с вышеуказанным общественным представлением о том, что для обучения подзыву и решения проблемы преследования (25) электронные ошейники менее эффективны, чем положительное подкрепление, и с сомнениями относительно эффективности программ дрессировки с использованием потенциально аверсивных стимулов, выдвинутыми Хиби и др. (3), Руни и Кованом (4), Фернандесом и др. (5), Зивом (6) и Массоном и др. (7, 35).
Прежде чем делать выводы относительно эффективности трех этих методов дрессировки, помимо применения электрических стимулов в процессе дрессировки следует рассмотреть еще два фактора. Первый касается погодных условий, поскольку ЭО-группу и Контрольную 1 дрессировали в середине зимы, а Контрольную 2 – 4 месяца спустя, ранней весной. Отчасти это было связано с доступностью выдвигаемых отраслью дрессировщиков, а отчасти с тем, что это дало время на отбор собак из большей популяции, доступной для дрессировки без ЭО, чтобы они максимально совпадали с распределенными в ЭО-группу. И хотя мы не нашли опубликованных исследований на тему сезонной вариации результатов дрессировки собак, вариация окружающих условий наверняка на них влияет. И действительно, во время зимнего периода дрессировки наблюдались как экстремальные погодные условия в виде выпавшего снега и низкой дневной температуры, так и более мягкие периоды. Поэтому в рамках исследовательского анализа данных в ходе изначального проекта (AW1402a) мы изучили еженедельную вариацию данных в каждой группе и не обнаружили никаких различий в части использования команд, поведения собак или результатов дрессировки. Это говорит о том, что еженедельные изменения окружающей среды оказывали минимальное влияние и что дрессировщики сохраняли последовательный подход к дрессировке на протяжении всех недель сбора данных, несмотря на вызовы полевых условий.
Второй фактор касается различий в общих подходах к дрессировке между тремя группами и, в частности, между дрессировщиками в Контрольной 2 и дрессировщиками в ЭО-группе и Контрольной 1. Во-первых, в Контрольной 2 дрессировщики в первую очередь занимались обучением подзыву и меньше времени уделяли другим командам, включая “сидеть”, в то время как дрессировщики из ЭО-группы и Контрольной 1 решили работать как над подзывом, так и над общим послушанием, включая “сидеть” (Таблица 3), что, возможно, указывает на больший акцент на контролировании собаки наряду с достижением целевого поведения. Более того, хотя использование вербальных сигналов было схожим между тремя группами, сигналы рукой и, особенно, поводком были намного реже в Контрольной 2, чем в Контрольной 1 и ЭО-группе; при этом в Контрольной 1 сигналы рукой и поводком в процессе дрессировки использовались чаще, чем в ЭО-группе. Использование нескольких сигналов в ходе дрессировки может иметь различные эффекты. Например, использование дополнительных сопряжений, таких как давление поводка одновременно с командой подзыва, потенциально влияет на скорость обучения желаемой реакции. Улучшение в обучении будет в некоторой степени зависеть от стабильности подачи нескольких сигналов, но даже тогда собаки могут сформировать более надежные ассоциации с одними стимулами, но не с другими, из-за предвзятости обучения и восприятия или природы подачи сигнала. Например, сообщалось, что в процессе дрессировки собаки визуальные сигналы могут затенять вербальные, если подавать их одновременно (36). Таким образом, объяснение различий в результатах дрессировки может лежать в степени, в которой собаки подвергались награждающим и потенциально аверсивным стимулам в трех группах, и в диапазоне сигналов, использовавшихся для направления собачьего поведения.
Грубо говоря, собак из Контрольной 2 просили выполнить навык подзыва в ответ на вербальные сигналы и обычно награждали едой при возвращении к дрессировщику. Сигналы рукой использовались редко и, даже несмотря на то, что собаки часто были на поводке, натяжение поводка отмечалось очень редко. Как следствие, единственный сигнал использовался для запроса желаемого поведения и единственное сопряжение (еда) ассоциировалось с успешным выполнением реакции. Схожим образом, при обучении сидеть использовалась вербальная команда «сидеть» и собаки получали еду в качестве награды за выполнение реакции. В общем, в этой группе использовались наиболее простые и четкие сопряжения для ассоциативного научения.
Собак в ЭО-группе дрессировали согласно наилучшим практикам в индустрии: в самом начале дрессировщики оценили их чувствительность к настройкам ЭО, а дрессировка концентрировалась на ассоциации предупреждающего сигнала (встроенной в ошейник вибрации) с воздействием электрического стимула. Таким образом, интенсивность электрических стимулов можно было подстраивать под индивидуальную переносимость собаки и собаки могли научиться менять свое поведение так, чтобы избегать электрических стимулов (форма отрицательного подкрепления). Это замысловатое применение электронных ошейников контрастирует с тем, как их использовали некоторые дрессировщики в исследовании Купера и др (31): они использовали ЭО на максимальной мощности и применяли электрический стимул после того, как собака вовлечется в нежелательное поведение, например, погоню за овцой, без использования предупреждающих сигналов. Поскольку кнопки для подачи предупреждающего сигнала находились на том же пульте, что и кнопка для электрического стимула, было невозможно определить достоверно, когда применялись электрические стимулы, так что нам следует быть осторожными с выводами, когда использовались стимулы в ходе режимов дрессировки. Например, хоть и можно предположить, что электрические стимулы будут больше использоваться в самом начале дрессировки, когда определяется чувствительность и формируется ассоциация между стимулом и желаемым поведением, или что электрические стимулы будут скорее применяться, если собака не выполнила изначальную команду, установить это по имеющимся у нас данным невозможно. Например, в предыдущей опубликованной работе (31) в которой записывались вокализации и внезапные изменения позы, когда собаки находились на отдалении от дрессировщика, не было обнаружено изменения их частоты на протяжении 5 дней дрессировки. Эта свобода регулировать применение стимулов как часть программы дрессировки, а также включение других подходов к обучению целевому или другим поведениям согласовались с этическим одобрением нашего проекта, а также с нашей целью оценить наилучшую практику, поддерживаемую отраслью. Таким образом, пока собаки не подвергались наказанию, которое нельзя избежать, и дрессировщики придерживались стандартов индустрии, мы не могли искусственно насаждать стандартизированные программы дрессировки или препятствовать дрессировщикам в использовании других сигналов и/или сопряжений в ходе дрессировки, таких как сигналы рукой или поводком. В результате, хотя мы и не контролировали переменные экспериментальных исследований дрессировки с электронным ошейником (как например, в 37-39), мы достигли своей цели по оценке профессиональной дрессировки собак-компаньонов с проблемами поведения, с которыми обычно направляют к специалисту.
Собак в Контрольной группе 1 обучали те же дрессировщики, что и в ЭО-группе, а значит, они должны были придерживаться того же подхода в дрессировке, но без использования электрических стимулов. Собаки из этой группы носили деактивированный макет электронного ошейника (как и собаки из Контрольной 2), чтобы проконтролировать переменную ношения незнакомого устройства, а также как часть процесса ослепления наблюдателей к способу дрессировки при анализе видео. В результате, на этих собак надевали ошейник в начале каждой дрессировочной сессии, но в ходе дрессировки не подвергали электрическим или вибрационным стимулам. Таким образом, эти дрессировщики так же использовали смесь сигналов голосом, рукой и поводком, как и в ЭО-группе, и относительно мало пищевых наград в ходе дрессировки. Также было очевидно, что эти собаки получали больше сигналов рукой и поводком, чем собаки в ЭО-группе. Сигналы рукой включали в себя не только жесты, но и в некоторых случаях также сопровождались физическим контактом с собакой, чтобы привлечь ее внимание, остановить текущее поведение или натолкнуть ее в желаемое положение, в то время как сигналы поводком могли сопровождаться тем, что выглядело как рывки. Это более физическое и потенциально аверсивное использование контакта или давления поводка не наблюдалось ни на одном видео, относящемся к Контрольной группе 2, но однозначно определялось в обеих ЭО-группе и Контрольной 1. Эти качественные наблюдения подтверждают предположение, что дрессировщики в обеих ЭО-группе и Контрольной 1 больше сосредоточивались на принуждении к послушанию, нежели на постепенном формировании желаемой реакции (40).
Подводя итог, важной стратегией в концентрирующейся на наградах дрессировке в Контрольной группе 2 было положительное подкрепление последовательных приближений к желаемому поведению, в основном с вербальными сигналами, чтобы создать прочное сопряжение между словом-командой и реакцией (40). И наоборот, в ЭО-группе и Контрольной группе 1 использовались разнообразные сигналы и сопряжения, включая потенциально аверсивные манипуляции и давление поводком в ходе дрессировки. С хорошим таймингом они могли бы привести к отрицательному подкреплению, но с плохим таймингом или применением неприятных стимулов в ответ на отказ выполнить желаемое поведение они принимают форму наказания. Часто утверждается, что использование аверсива в дрессировке собак приводит к худшим результатам обучения и представляет собой бОльшую угрозу благополучию, по сравнению с дрессировкой, основанной на наградах (3-6). Наши результаты в виде прямых свидетельств из реальных жизненных ситуаций демонстрируют, что основанная на наградах дрессировка действительно более эффективна, чем методы, включающие в себя потенциально аверсивные стимулы, такие как электрический ток или излишнее давление поводка. И хотя наши результаты могут отражать общие различия в стиле дрессировки групп дрессировщиков, участвовавших в исследовании, а не использование электронного ошейника как такового, мы бы с этим поспорили, поскольку использовавшие ЭО дрессировщики были выдвинуты представителями производителя как примеры наилучшей практики; их данные (по крайней мере, в отношении использования ЭО) следует рассматривать как представляющие собой наилучший сценарий развития событий для профессиональной дрессировки с ЭО. Есть вероятность, что менее опытные дрессировщики и владельцы будут обладать худшими навыками и, следовательно, применение ими этого устройства будет еще менее эффективным (25, 35).
В целом, профессиональное применение режима концентрирующейся на наградах дрессировки, как было продемонстрировано Контрольной группой 2, превосходило ЭО-группу и Контрольную группу 1 по каждому измерению эффективности, где имелось значимое различие. Кроме того, собаки в Контрольной 1 показали образовательные результаты не лучше, чем собаки из ЭО-группы, что означает, что выдвинутые производителем дрессировщики одинаково эффективно корректировали нежелательное поведение как с применением ЭО в качестве одного из методов дрессировки, так и без него. Исходя из того, что наилучшие параметры целевого навыка ассоциировались с концентрирующейся на наградах программе дрессировки и что применение ЭО не защищает лучше от непослушания, мы делаем заключение, что для эффективного обучения подзыву нет необходимости в ЭО. А учитывая дополнительные возможные риски для благополучия животного, связанные с использованием ЭО (7, 25, 31, 38, 39), мы делаем вывод, что дрессировка собак с применением таких устройств причиняет ненужные страдания, связанные с повышенным риском угрозы благополучию собаки в ходе их использования, не имея надежных доказательств лучших результатов.
ЗАЯВЛЕНИЕ О ДОСТУПНОСТИ ДАННЫХ
Авторы сделают доступными сырые данные, поддерживающие выводы этой статьи, без излишнего предварительного заказа
ЗАЯВЛЕНИЕ ОБ ЭТИКЕ
Комитет по этике исследований Университета Линкольна рассмотрел и одобрил данное исследование на животных. Владельцы дали письменное информированное согласие на участие их животных в данном исследовании.
ВКЛАД АВТОРОВ
Люси Чайна взяла на себя видеонаблюдение и кодирование поведения на видеозаписях дрессировки, а также первичный статистический анализ, и руководила написанием основной статьи. Дэниел Миллс и Джонатан Купер были ее руководителями в написании ее магистерской диссертации, оказывавшими поддержку на всем пути. Все авторы сделали равные вклады в написание финальной статьи.
ФИНАНСИРОВАНИЕ
Мы бы хотели поблагодарить DEFRA за финансирование оригинального исследования (AW1402A). Мы бы также хотели поблагодарить Университет Линкольна, предоставивший стипендию для поддержки выпускников магистерской диссертации Люси Чайна на основании тезиса исследования.
БЛАГОДАРНОСТИ
Авторы хотят поблагодарить DEFRA за финансирование оригинального проекта (AW1402A), а также ECMA и APDT за поддержку выдвижения лучших из доступных дрессировщиков и за поддержку в наборе собак посредством рекомендаций. Мы бы так же хотели поблагодарить владельцев собак за добровольное участие в данном исследовании. Мы бы также хотели выразить признательность Ханне Райт и Джессике Хардиман за работу с дрессировщиками в поле и запись занятий на видео, а также Мари Делпех, Эмме Косби, Рэйчел Никлин и Молли Тэйлор, которые раньше работали с Люси Чайна над разработкой методов для оценки эффективности методов дрессировки для этого исследования.
ССЫЛКИ
- Burch MR. The Evolution of Modern-Day Dog Training and Obedience. (2002). Available online at: http://www.naiaonline.org/articles/article/the- evolution- of- modern- day- dog- training#sthash.kMpTEvbM.vcAxIBoe.dpbs (accessed November 27, 2019).
- Gray SA. A Short History of Dog Training. US: Animal Wellness Magazine (2018). Available online at: https://animalwellnessmagazine.com/history- dog-training/ (accessed November 29, 2019).
- Hiby EF, Rooney NJ, Bradshaw JWS. Dog training methods: their use, effectiveness and interaction with behaviour and welfare. Anim Welf. (2004) 13:63–9.
- Rooney NJ, Cowan S. Training methods and owner–dog interactions: links with dog behaviour and learning ability. Appl Anim Behav Sci. (2011) 132:169– 77. doi: 10.1016/j.applanim.2011.03.007
- Fernandes JG, Olsson IAS, de Castro ACV. Do aversive-based training methods actually compromise dog welfare? A literature review. Appl Anim Behav Sci. (2017) 196:1–12. doi: 10.1016/j.applanim.2017. 07.001
- Ziv G. The effects of using aversive training methods in dogs—a review. J Vet Behav Clin Appl Res. (2017) 19:50–60. doi: 10.1016/j.jveb.2017. 02.004
- Masson S, de la Vega S, Gazzano A, Mariti C, Pereira GDG, Halsberghe C, et al. Electronic training devices: discussion on the pros and cons of their use in dogs as a basis for the position statement of the European Society of Veterinary Clinical Ethology. J Vet Behav Clin Appl Res. (2018) 25:71–75. doi: 10.1016/j.jveb.2018.02.006
- APDT-UK. Association of Pet Dog Trainers. APDT. Available online at: https:// apdt.co.uk/ (accessed March 30, 2020).
- Stallard C. A Ban on Using Electric Shock Collars Is Great – but We Need to Ban Sales of Aversive Devices to Protect Pets. Blue Cross. Available online at: https://www.bluecross.org.uk/we- need- to- ban- aversive- devices- to- protect- pets (accessed November 25, 2019).
- Lines JA, Van Driel K, Cooper JJ. The characteristics of electronic training collars for dogs. Vet Rec. (2013) 172:288. doi: 10.1136/vr.1 01144
- Companion Animal Welfare Council, CAWC. The Use of Electric Pulse Training Aids (EPTAs) in Companion Animals. (2012). Available online at: http://eprints.lincoln.ac.uk/14640/1CAWC%20ecollar%20report.pdf (accessed December 3, 2019).
- Polsky RH. Electronic shock collars: are they worth the risks? J Am Anim Hosp Assoc. (1994) 30:463–8.
- Polsky RH. Can aggression in dogs be elicited through the use of electronic pet containment systems? J Appl Anim Welf Sci. (2000) 3:345–57. doi: 10.1207/S15327604JAWS0304_6
- Blackwell EJ, Casey RA. The use of shock collars and their impact on the welfare of dogs: A review of the current literature (2006). Available online at: https://positively.com/files/The- Use- of- Shock- Collars- and- Their- Impact- on- the- Welfare- of- Dogs.pdf (accessed November 10, 2019).
- Ward M, MacKellar I. Shock Collars – The Shocking Truth. APBC (2010). Available online at: https://www.apbc.org.uk/pet- owner- article/ shock- collars- the- shocking- truth/ (accessed June 18, 2019).
- Dogs Trust. We Call on Government to Ban Electric Shock Collars. Dogs Trust (2018). Available online at: https://www.dogstrust.org.uk/news-events/news/ electric- shock- collars- news (accessed November 25, 2019).
- O’Brien C. RSPCA Highlight Importance of Electric Shock Collar Ban – 100 Months on. RSPCA (2018). Available online at: https://news.rspca.org.uk/ 2018/08/17/rspca- highlight- importance- of- electric- shock- collar- ban- 100- months- on/ (accessed November 24, 2019).
- Kennel Club. UK Wide Electric Shock Collar Ban Will Save Hundreds of Thousands of Dogs From Aversive Training Devices. Kennel Club (2018). Available online at: https://www.thekennelclub.org.uk/press- releases/ 2018/august/uk- wide- electric- shock- collar- ban- will- save- hundreds- of- thousands- of- dogs- from- aversive- training- devices/ (accessed March 2020).
- Electronic Collars Manufacturers Association, ECMA. EMCA Products: Electronic Training Products Fall Into 3 Main Types. EMCA (1996). Available online at: http://ecma.eu.com/product/ (accessed November 27, 2019).
- Christiansen FO, Bakken M, Braastad BO. Behavioural differences between three breed groups of hunting dogs confronted with domestic sheep. Appl Anim Behav Sci. (2001) 72:115–29. doi: 10.1016/S0168-1591(00)0 0202-1
- Christiansen FO, Bakken M, Braastad BO. Social facilitation of predatory, sheep-chasing behaviour in Norwegian Elkhounds, grey. Appl Anim Behav Sci. (2001) 72:105–14. doi: 10.1016/S0168-1591(00)00208-2
- Salgirli Y, Schalke E, Boehm I, Hackbarth H. Comparison of learning effects and stress between 3 different training methods (electronic training collar, pinch collar and quitting signal) in Belgian Malinois Police Dogs. Rev Med Vet. (2012) 163:530–5
- Dale AR, Statham S, Podlesnik CA, Eliffe D. The acquisition and maintenance of dogs’ aversion responses to kiwi (Apteryx spp.) training stimuli across time and locations. Appl Anim Behav Sci. (2013) 146:107–11. doi: 10.1016/j.applanim.2013.04.006
- Robertson. Consultation on Potential Controls or Prohibition of Electronic Training Aids in Scotland: Analysis of Consultation Responses. The Scottish Government (2016). Available online at: http://www.gov.scot/Resource/0050/ 00503099.pdf (accessed June 16, 2019).
- Blackwell EJ, Bolster C, Richards G, Loftus BA, Casey RA. The use of electronic collars for training domestic dogs: estimated prevalence, reasons and risk factors for use, and owner perceived success as compared to other training methods. BMC Vet Res. (2012) 8:93. doi: 10.1186/1746-61 48-8-93
- PDSA. PDSA Animal Wellbeing (PAW) Report 2019. PDSA (2019). Available online at: https://www.pdsa.org.uk/media/7420/2019-paw-report_ downloadable.pdf (accessed November 27, 2019).
- Animal Welfare (Electronic Collars) (Wales) Regulations 2010 (No. 943 W. 97). Welsh Assembly (2010). Available online at: https://www.legislation.gov.uk/ wsi/2010/943/contents/made (accessed June 10, 2019).
- Scottish Government. Scottish Government Policy on Electronic Training Collars. Scottish Government (2018). Available online at: http://www.gov.scot/Topics/farmingrural/Agriculture/animal- welfare/ AnimalWelfare/companion/electronictrainingaids (accessed June 10, 2019).
- DEFRA. A ban on electronic training collars for cats and dogs in England. Department for Environment, Food & Rural Affairs (2018). Available online at: https://consult.defra.gov.uk/animal- health- and- welfare/ban- on- electronic- training- collars- cats- and- dogs/supporting__documents/ ecollarsconsultdocument.pdf (accessed June 10, 2019).
- Ripley K. Everything You Need to Know About Training With E-Collars. Wide Open Pets (2019). Available online at: https://www.wideopenpets.com/ everything- need- know- training- E- collars/ (accessed March 29, 2020).
- Cooper JJ, Cracknell N, Hardiman J, Wright H, Mills D. The welfare consequences and efficacy of training pet dogs with remote electronic training collars in comparison to reward based training. PLoS ONE. (2014) 9:e102722. doi: 10.1371/journal.pone.0102722
- DEFRA. Studies to Assess the Effect of Pet Training Aids, Specifically Remote Static Pulse Systems, on the Welfare of Domestic Dogs – AW1402. Final report prepared by Prof. Jonathan Cooper, Dr. Hannah Wright, Prof. Daniel Mills (University of Lincoln); Dr. Rachel Casey, Dr. Emily Blackwell (University of Bristol); Katja van Driel (Food and Environment Research Agency); Dr. Jeff Lines (Silsoe Livestock System) (2013). Available online at: http://sciencesearch.defra.gov.uk/Default.aspx?Menu=Menu&Module= More&Location=None&Completed=0&ProjectID=15332 (accessed June 16, 2019).
- DEFRA. Studies to Assess the Effect of Pet Training Aids, Specifically Remote Static Pulse Systems, on the Welfare of Domestic Dogs; Field Study of Dogs in Training – AW1402A. Final report prepared by Prof. Jonathan Cooper, Dr. Nina Cracknell, Jessica Hardiman and Prof. Daniel Mills (University of Lincoln) (2013). Available online at: http://sciencesearch.defra.gov.uk/ Default.aspx?Menu=Menu&Module=More&Location=None&Completed= 0&ProjectID=17568#discription (accessed June 16, 2019).
- China L. Comparison of E-collar and Reward Based Training on Acute Behavioural Responses and Efficacy of Training in Pet Dogs. BSc. University of Lincoln (2018).
- Masson S, Nigron I, Gaultier E. Questionnaire survey on the use of different e-collar types in France in everyday life with a view to providing recommendations for possible future regulations. J Vet Behav Clin Appl Res. (2018) 26:48–60. doi: 10.1016/j.jveb.2018. 05.004
- Skyrme R, Mills DS. An investigation into potential overshadowing of verbal commands during training. J Vet Behav Clin Appl Res. (2010) 1:42. doi: 10.1016/j.jveb.2009.09.039
- Beerda B, Schilder MBH, van Hoff Jan ARAM, de Vries HW, Mola JA. Behavioural, saliva cortisol and heart rate responses to different types of stimuli in dogs. Appl Anim Behav Sci. (1998) 58:365–81. doi: 10.1016/S0168-1591(97)00145-7
- Schalke E, Stichnoth J, Ott S, Jones-Baade R. Clinical signs caused by the use of electric training collars on dogs in everyday life situations. Appl Anim Behav Sci. (2007) 105:369–80. doi: 10.1016/j.applanim.2006.
- Schilder MB, van der Borg JA. Training dogs with help of the shock collar: short and long term behavioural effects. Appl Anim Behav Sci. (2004) 85:319– 34. doi: 10.1016/j.applanim.2003.10.004
- Mills DS. Training and learning protocols. In: Horwitz DF, Mills DS, editors. BSAVA Manual of Canine and Feline Behavioural Medicine. Cheltenham Glos: BSAVA (2009). p. 49–64.